En la actualidad, los robots comerciales e industriales son ampliamente utilizados, y realizan tareas de forma más exacta o más barata que los humanos. También se les utiliza en trabajos demasiado sucios, peligrosos o tediosos para los humanos. Los robots son muy utilizados en plantas de manufactura, montaje y embalaje, en transporte, en exploraciones en la Tierra y en el espacio, cirugía, armamento, investigación en laboratorios y en la producción en masa de bienes industriales o de consumo.
Otras aplicaciones incluyen la limpieza de residuos tóxicos, minería, búsqueda y rescate de personas y localización de minas terrestres. Existe una gran esperanza, especialmente en Japón, de que el cuidado del hogar para la población de edad avanzada pueda ser desempeñado por robots.
Los androides imitan el comportamiento de las personas, pero su utilidad en la actualidad es de solo experimentación pues no se encuentran comercialmente. En la actualidad, los robots comerciales e industriales son ampliamente utilizados, y realizan tareas de forma más exacta o más barata que los humanos. También se les utiliza en trabajos demasiado sucios, peligrosos o tediosos para los humanos. Los robots son muy utilizados en plantas de manufactura, montaje y embalaje, en transporte, en exploraciones en la Tierra y en el espacio, cirugía, armamento, investigación en laboratorios y en la producción en masa de bienes industriales o de consumo.
Otras aplicaciones incluyen la limpieza de residuos tóxicos, minería, búsqueda y rescate de personas y localización de minas terrestres.
Existe una gran esperanza, especialmente en Japón, de que el cuidado del hogar para la población de edad avanzada pueda ser desempeñado por robots.
Los robots parecen estar abaratándose y reduciendo su tamaño, una tendencia relacionada con la miniaturización de los componentes electrónicos que se utilizan para controlarlos. Además, muchos robots son diseñados en simuladores mucho antes de construirse y de que interactúen con ambientes físicos reales. Un buen ejemplo de esto es el equipo Spiritual Machine, un equipo de 5 robots desarrollado totalmente en un ambiente virtual para jugar al fútbol en la liga mundial de la F.I.R.A.
Además de los campos mencionados, hay modelos trabajando en el sector educativo, servicios (por ejemplo, en lugar de recepcionistas humanos o vigilancia) y tareas de búsqueda y rescate.
USOS MÉDICOS
Recientemente, se ha logrado un gran avance en los robots dedicados a la medicina, con dos compañías en particular, Computer Motion e Intuitive Surgical, que han recibido la aprobación regulatoria en América del Norte, Europa y Asia para que sus robots sean utilizados en procedimientos de cirugía invasiva mínima. Desde la compra de Computer Motion (creador del robot Zeus) por Intuitive Surgical, se han desarrollado ya dos modelos de robot daVinci por esta última. En la actualidad, existen más de 800 robots quirúrgicos daVinci en el mundo, con aplicaciones en Urología, Ginecología, Cirugía general, Cirugía Pediátrica, Cirugía Torácica, Cirugía Cardíaca y ORL. También la automatización de laboratorios es un área en crecimiento. Aquí, los robots son utilizados para transportar muestras biológicas o químicas entre instrumentos tales como incubadoras, manejadores de líquidos y lectores. Otros lugares donde los robots están reemplazando a los humanos son la exploración del fondo oceánico y exploración espacial. Para esas tareas se suele recurrir a robots de tipo artrópodo.
MODELOS DE VUELO
En fases iniciales de desarrollo hay robots alados experimentales y otros ejemplos que explotan el biomimetismo. Se espera que los así llamados nanomotores y cables inteligentes simplifiquen drásticamente el poder de locomoción, mientras que la estabilización en vuelo parece haber sido mejorada substancialmente por giroscopios extremadamente pequeños.
EJEMPLO
El instituto nacional de la ciencia y de la tecnología industriales avanzadas (AIST) de Japón conjuntamente con las industrias de Kawada ahora ha lanzado el humanoide de HRP-4C. Este humanoide cuenta con 1.58 metros de alto (62") y pesa 43 kilogramo = 95 libras. Puede caminar lentamente y los parecer una señora joven. Ella tiene 30 DOF y venderá para cerca de 20 millones de Yenes o $200.000.
KITECH (instituto coreano de la tecnología industrial) ha introducido otro androide llamado EveR-3. Ella es de 1.57 m de alto (5' 2") y pesa 135 libras (60 kilogramos) y es capaz de realizar 16 expresiones faciales. Ella tiene 35 DOF en su cuerpo superior.
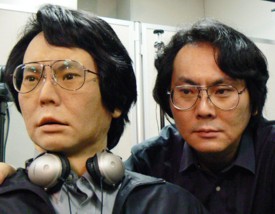
a. Profesor Hiroshi Ishiguro de la universidad de Osaka ha tenido una robusteza del doppelganger hecha de se. Ishiguro es el mismo profesor que conduce el equipo que construyó el actroid (véase abajo) y el actroid DER y el actroid DER2 (demostrado arriba). Este androide tiene 46 grados de libertad.
China ha introducido a Dion llamado androide cantante. Mientras que no es casi tan avanzada como el Actroid demostrado arriba, es muy realista. Es un androide derecho vida-clasificado con muy womanly una forma.